 Dexter se adapta a diferentes ambientes e tarefas, como fazem os humanos. Após tentativas frustradas, robô modifica seus movimentos para conseguir andar.
Dexter se adapta a diferentes ambientes e tarefas, como fazem os humanos. Após tentativas frustradas, robô modifica seus movimentos para conseguir andar.
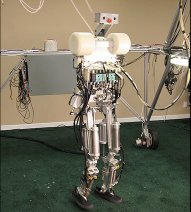
Pesquisadores do laboratório Anybots, na Califórnia (EUA), empregaram a filosofia do “aprenda com seus erros” para fazer com que o robô Dexter levante-se, ande e, futuramente, corra. Ao contrário de outros autômatos, o Dexter não é programado para as missões que deve cumprir: ele analisa cada situação, para que consiga se adaptar a diferentes ambientes e às mais diversas tarefas, como fazem os humanos. Em desenvolvimento desde 2001, o robô mede 1,78 metro e pesa cerca de 61 kg.
“Quando começamos a desenvolvê-lo, tínhamos uma idéia muito vaga de como os movimentos da caminhada funcionariam. Das primeiras vezes que ele tentou andar, caiu. Então, demos foco à posição das juntas, à força dos pés e à questão do equilíbrio. Passamos essa informação para Dexter, que analisou os dados e modificou a maneira como se movimentava”, afirmou Trevor Blackwell, co-fundador da Anybots, à “BBC”.
A primeira caminhada aconteceu em meados de fevereiro deste ano. Clique aqui para assistir a um vídeo do Dexter.
Em seu site, o laboratório explica que os robôs de duas pernas, como o Asimo, da Honda, utilizam em sua programação um algoritmo chamado Zero Moment Point (ZMP), que garante a estabilidade dos autômatos — para seguir as instruções, eles precisam ter pés grandes e juntas muito rígidas. O Dexter, por sua vez, dispensa o ZMP e tem juntas movidas por cilindros de ar, flexíveis como músculos de seres humanos.
“Não há uma postura estável para o Dexter [como acontece com o Asimo], com a qual consiga equilíbrio constante. Por isso, é necessário que ele sempre faça ajustes. Ele anda da mesma maneira que os humanos fazem, usando, inclusive, sapatos parecidos com os nossos”, diz um texto no site do laboratório norte-americano.
Segundo os pesquisadores, o fato de o robô não ter uma postura “engessada” lhe dá muitas vantagens. Ele pode, por exemplo, caminhar em superfícies macias ou muito duras. Também consegue se manter em pé quando é empurrado. Além disso, suas juntas flexíveis absorvem impacto e permitirão, no futuro, que ele corra e pule obstáculos. A equipe do laboratório afirma que essa etapa de dar velocidade à caminhada será conquistada nos próximos meses.
Fonte: G1
